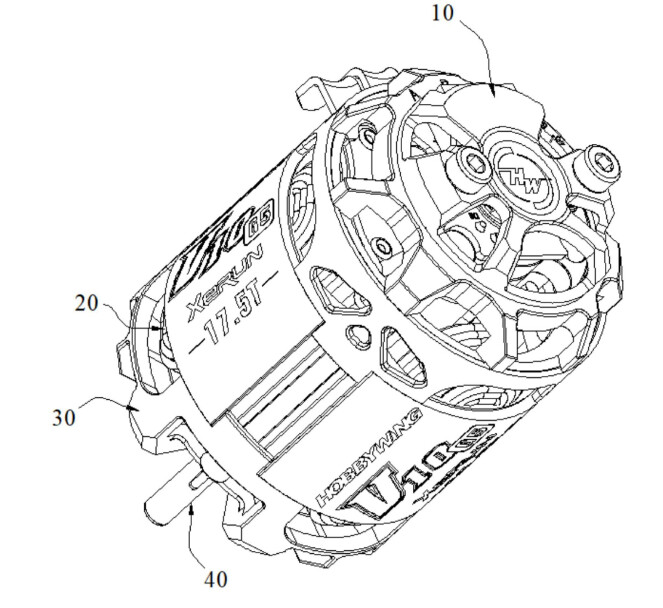
Scoop interplanétaire (enfin je crois…), voici les détails du nouveau brushless HobbyWing Xerun V10 G5.
La demande de brevet chinois correspondant a été publiée le 23 janvier 2026, mais pas sous le nom de Hobbywing, mais sous celui de 惠州好盈电机有限公司 (Huizhou Haoying Motor Co., Ltd.), qui est une filiale de Hobbywing.
2 « J'aime »
Comme c’est un peu long, en voici un résumé:
Cette demande de brevet introduit essentiellement un système de micro-positionnement mécanique externe pour capteurs Hall, permettant une correction post-assemblage des erreurs de fabrication/soudage, comparable aux systèmes d’ajustement optique dans les instruments de précision.
@Bastien, tu n’auras plus besoin de dessouder et de ressouder correctement les capteurs!
Contexte et problématique
Dans les moteurs sans balais haute performance pour modélisme RC, les capteurs Hall triphasés (A, B, C) assurent la détection de position du rotor pour la commutation électronique. Les systèmes actuels présentent une erreur angulaire importante (±4° pour un calage théorique à 43°, plage réelle 39-47°) due aux imprécisions de soudage et d’assemblage, entraînant :
- Augmentation des pertes énergétiques
- Pulsations de couple significatives
- Contrôle de précision insuffisant pour applications compétitives
Innovation principale
Système de micro-réglage différentiel à trois points permettant un ajustement fin de chaque capteur Hall individuellement via des vis Jimmy (vis sans tête à six pans creux) accessibles de l’extérieur, sans démontage.
Architecture technique
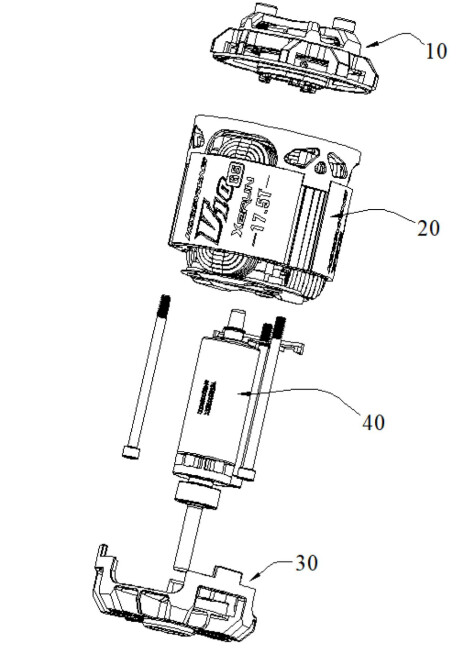
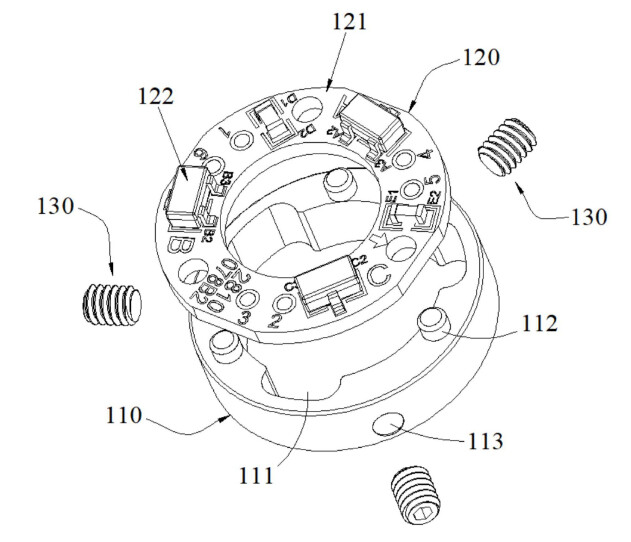
1. Ensemble Hall (composant mobile)
- Anneau Hall (110) avec carte Hall (120) portant les capteurs triphasés
- Trois trous de réglage (113) diamétralement répartis, chacun équipé d’une vis Jimmy (130)
- Système de positionnement : colonnes (112) traversant des trous de la carte Hall pour maintien mécanique
- Zones d’évitement (111) pour passage des conducteurs de connexion
2. Ensemble de détection (composant fixe)
Base de détection (220) comprenant :
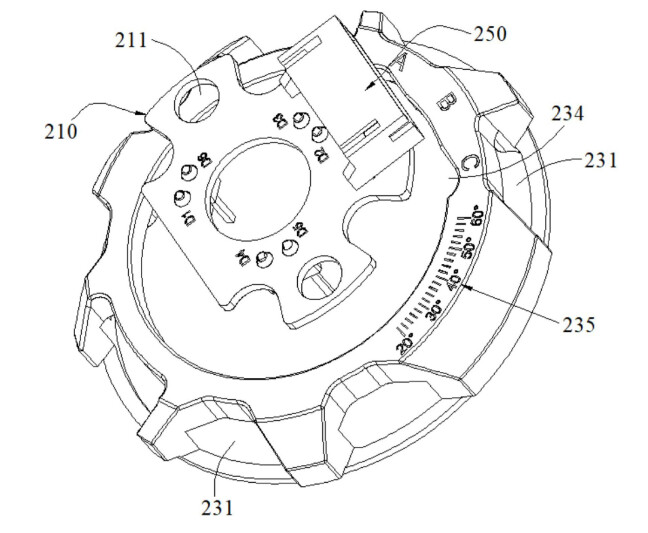
- Plaque fixe de détection (223) supportant la carte PCB de connexion (210)
- Plaque de limitation de rotation (224) de diamètre supérieur, avec première saillie de limitation (225)
- Colonne de positionnement en saillie (222) recevant l’anneau Hall avec roulement central (300) pour rotation sans friction
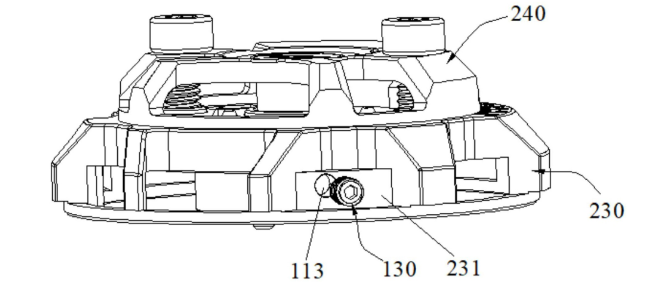
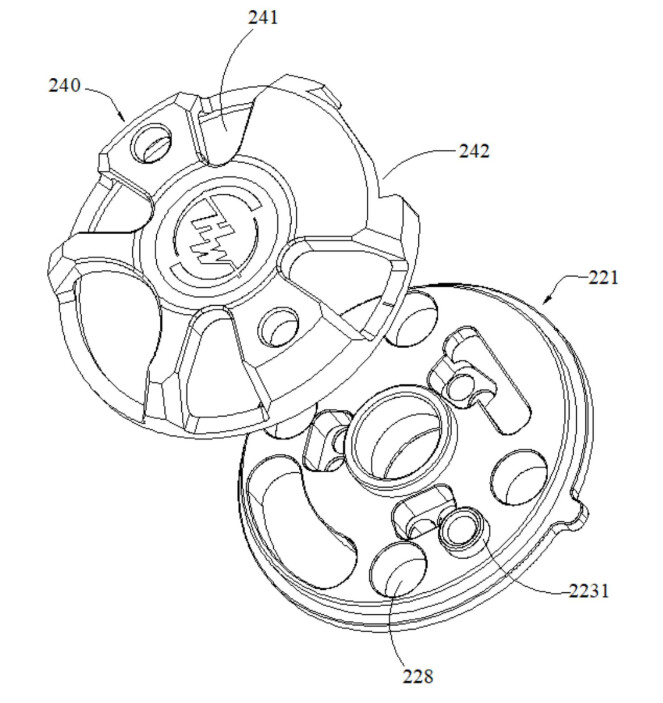
Couvercle arrière (230) avec :
- Rainure d’évitement (232) logeant la plaque de limitation de rotation
- Première rainure en arc de cercle (233) définissant la plage angulaire de rotation globale (système de came)
- Deuxième rainure en arc de cercle (234) pour limitation de la borne de connexion Hall (250)
- Trous d’évitement (231) permettant l’accès aux vis de réglage sans démontage
- Graduations (235) pour repérage angulaire précis
Couvercle de détection (240) avec canaux de dissipation thermique (241) communicant avec les trous de dissipation (228) et trous d’évitement pour refroidissement intégré.
Principe de fonctionnement
Réglage global (ajustement grossier)
La plaque fixe de détection peut pivoter dans la rainure d’évitement, entraînant l’ensemble Hall + PCB. La première saillie de limitation glisse dans la première rainure en arc de cercle, définissant la plage angulaire maximale de rotation. Les graduations permettent un positionnement initial précis.
Réglage différentiel (ajustement fin)
Pour chaque phase Hall (A, B, C) :
- Si l’angle mesuré est trop grand : serrer les vis des deux autres phases → rapproche ces capteurs de la plaque de détection
- Si l’angle mesuré est trop petit : desserrer les vis des deux autres phases → éloigne ces capteurs de la plaque de détection
Ce réglage modifie la distance capteur/anneau magnétique du rotor, ajustant ainsi la position de détection coaxiale.
Performances revendiquées
- Précision angulaire : ±0,1° (amélioration d’un facteur 40 par rapport aux ±4° conventionnels)
- Accessibilité : réglage in-situ via trous d’évitement, sans démontage
- Répétabilité : maintien mécanique par colonnes de positionnement multiples
- Stabilité thermique : système de dissipation thermique intégré
Avantages système
- Réduction des pulsations de couple par optimisation de l’alignement magnétique
- Amélioration du rendement via réduction des pertes par commutation imprécise
- Flexibilité : double système de réglage (global + différentiel)
- Maintenabilité : ajustement sans démontage grâce aux accès dédiés
- Protection anti-erreur : zones d’évitement empêchant assemblage incorrect
Aspects présentés comme innovants
- Architecture à double niveau de réglage (global/différentiel) dans un système compact
- Système de vis Jimmy accessibles radialement à travers couvercle avec trous d’évitement communicants
- Mécanisme de limitation angulaire par came (saillie/rainure en arc) pour définition précise de course
- Intégration thermique : trous d’évitement servant également de conduits de refroidissement
- Positionnement multiple redondant pour stabilité mécanique sous vibrations
1 « J'aime »
Malheureusement, si, toujours et encore dans les cas les plus problématiques (je ne le recommande pas du tout d’ailleurs). Les sondes étant soudées toutes sur le même PCB: cette solution ne résout pas le vrai problème mais plutôt l’erreur de marquage sur la cage.
Avec le centrage via les vis, ca va aider mais ca reste du bricolage qui va demander énormément de patience. Comme ca, on pourra surtout acheter les moteurs « Préparé - Team Edition » bien plus cher. Pas fou.
Effectivement, je me suis enthousiasmé trop vite…
Reste que Hobbywing est plutôt un bon élève de ce que j’ai pu observer.
Cette semaine, j’ai testé un moteur d’une autre marque qui avait 16° d’erreur de marquage sur la cage. Maintenant il est réglé à 36°, mais il est sur le marquage 20° de la cage! Pas sûr qu’un tel système aurait suffit.

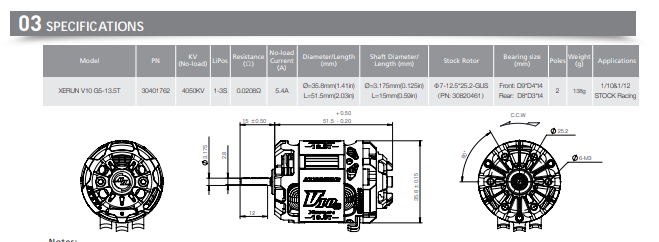
Pour le moment, les spécifications ne mentionnent que la version 13.5T.
Update: d’après des commentaires Facebook, le 17.5t arrive après les worlds en Chine. Le focus a été mis sur le 13.5t vu qu’ils sont utilisés dans la catégorie stock lors de cet événement.
1 « J'aime »
